Title: Agile asymmetric multi-legged locomotion contact planning via geometric mechanics and spin model duality
Authors: Jackson Habala, Gabriel B. Margolis, Tianyu Wang, Pratyush Bhatt, Juntao He, Naheel Naeem, Zhaochen Xu, Pulkit Agrawal, Daniel I. Goldman, Di Luo, Baxi Chong
arXiv: https://arxiv.org/abs/2602.09123
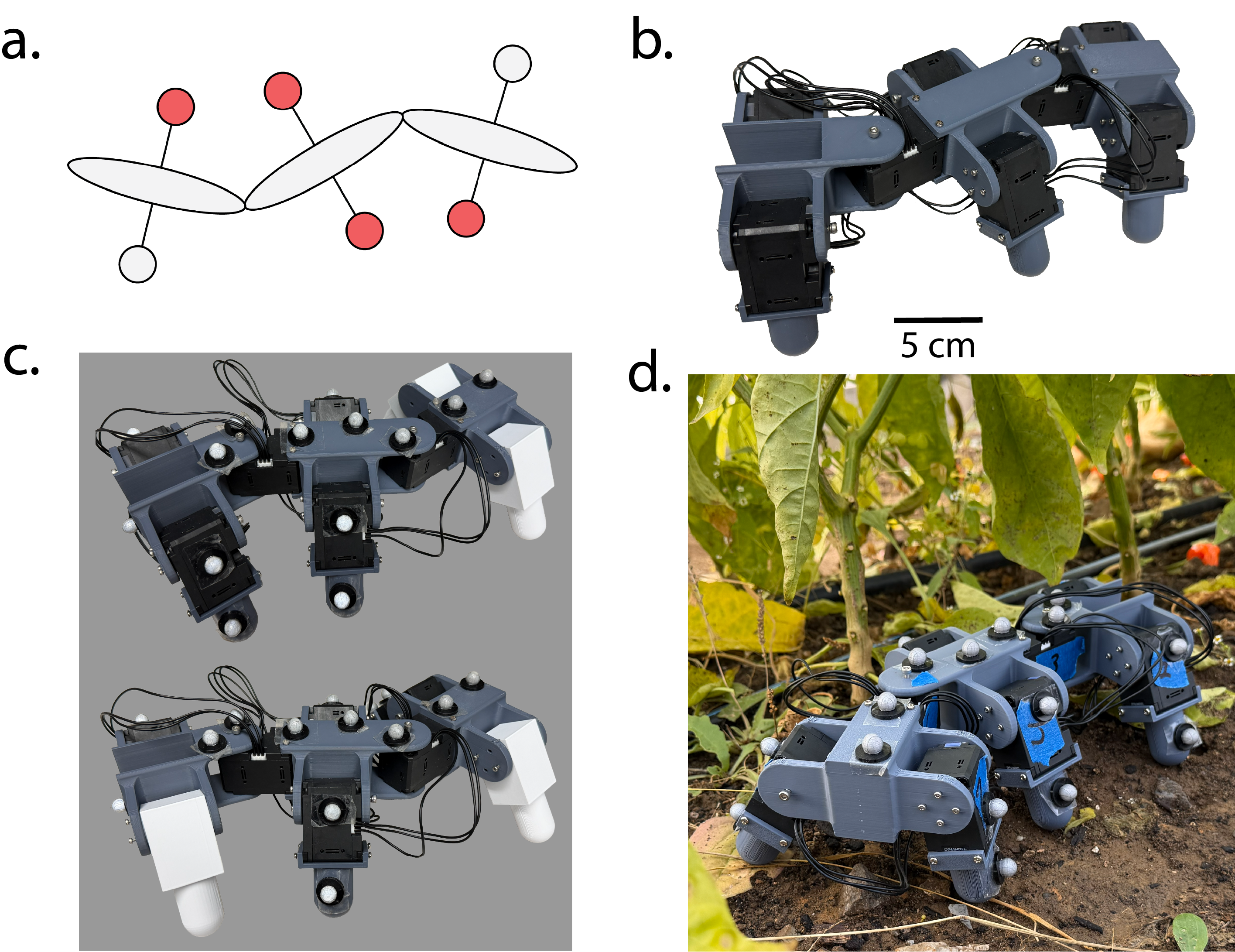
这篇工作的关键价值是把“多足接触规划的组合爆炸”改写成“可控对称破缺”的问题。传统六足步态往往从对称模板出发,虽然稳定但容易卡在保守解;作者用几何力学给出形状变量与机体速度的映射,再用类似自旋系统能量最小化的视角搜索接触序列,使策略可以系统性探索非对称步态,从而在速度和容错上同时获益。
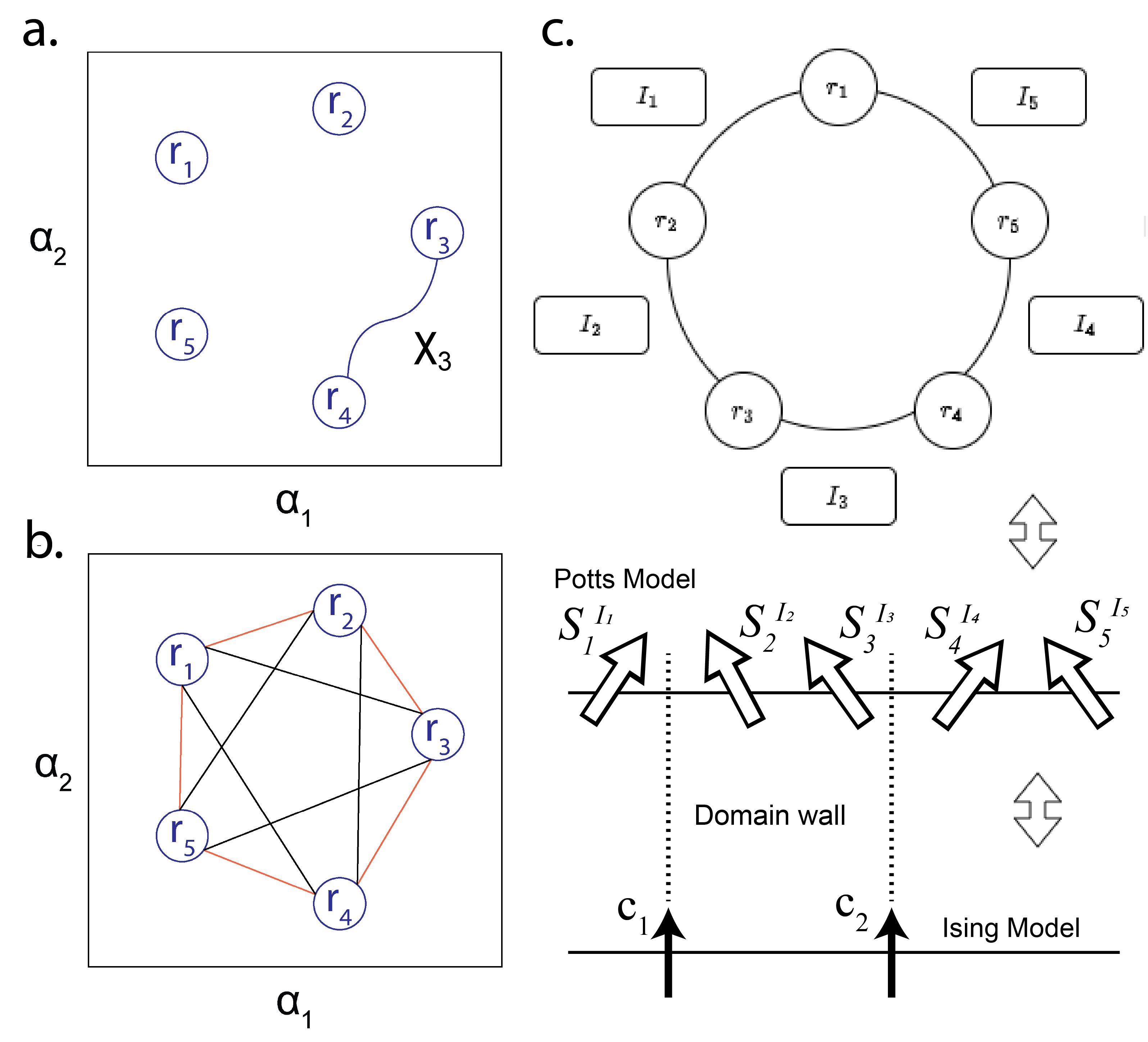
方法层面可以看成两段:先估计局部连接关系 ,把关节形状变化转为机体 twist;再在离散接触状态上做代价优化,权衡前进收益、稳定性和切换成本:
直观上,这个目标鼓励“有效破坏对称而不是随机乱跳”,最终产生带偏航调制的高机动步态。阅读实验时建议重点看:与经典 tripod gait 的单位周期位移对比、强行恢复对称约束后的性能回退、以及摩擦/负载扰动下失败率变化。局限在于几何近似对高冲击工况不一定稳健,且主要验证集中在单一六足形态,跨机体泛化仍需补证。
Figures