Title: YOR Your Own Mobile Manipulator for Generalizable Robotics
Authors: Manan H Anjaria, Mehmet Enes Erciyes, Vedant Ghatnekar, Neha Navarkar, Haritheja Etukuru, Xiaole Jiang, Kanad Patel, Dhawal Kabra, Nicholas Wojno, Radhika Ajay Prayage, Soumith Chintala, Lerrel Pinto, Nur Muhammad Mahi Shafiullah, Zichen Jeff Cui
arXiv: https://arxiv.org/abs/2602.11150
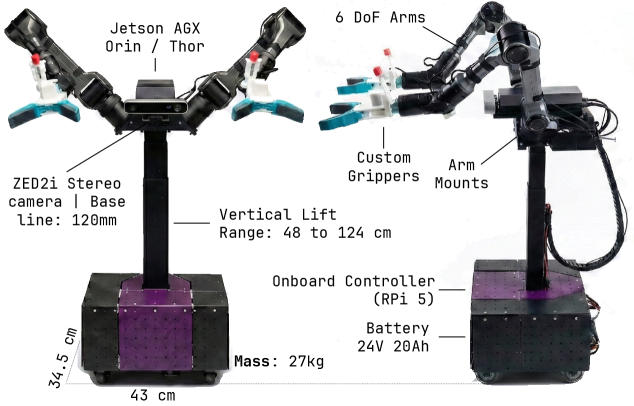
YOR的定位不是再造一个高性能封闭平台,而是把“可负担、可复现、可扩展”的移动操作底座真正做成社区可用基础设施。它以全向底盘、升降机构和双臂为核心,强调整机协同工作空间,而不是把移动与操作割裂。
从系统目标可抽象为能力-成本权衡 ,并通过
体现全身协同带来的可达域扩展。论文价值在于把“低成本”从口号落到可执行设计与任务验证上。阅读时建议看三件事:跨任务覆盖度、重复构建后的性能方差、以及低成本执行器对高接触精度任务的影响边界。
Figures