Title: Perceptive Humanoid Parkour: Chaining Dynamic Human Skills via Motion Matching
Authors: Zhen Wu, Xiaoyu Huang, Lujie Yang, Yuanhang Zhang, Koushil Sreenath, Xi Chen, Pieter Abbeel, Rocky Duan
arXiv: https://arxiv.org/abs/2602.15827
Problem framing
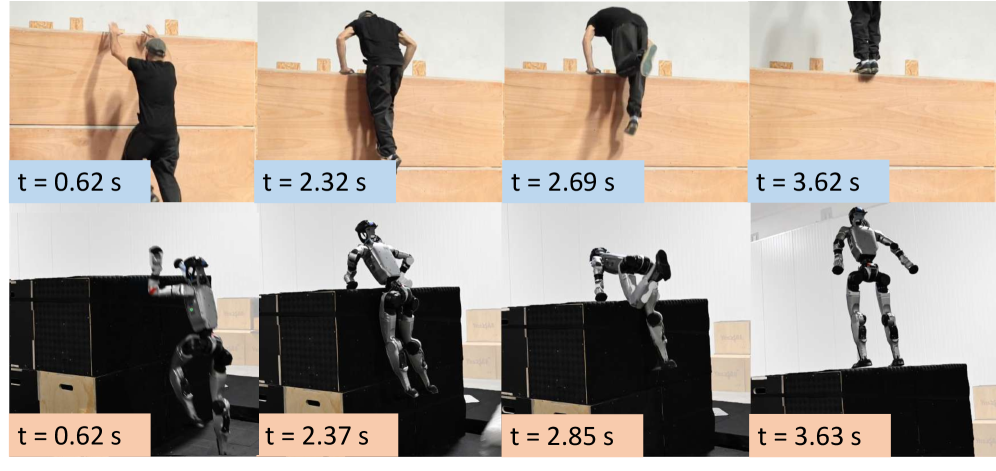
现有人形 locomotion 在“稳定行走”上进展快,但在高动态、长时程、感知驱动的 parkour 场景仍存在明显能力断层。核心痛点是技能切换不连续、感知与运动策略耦合不足。
Core method
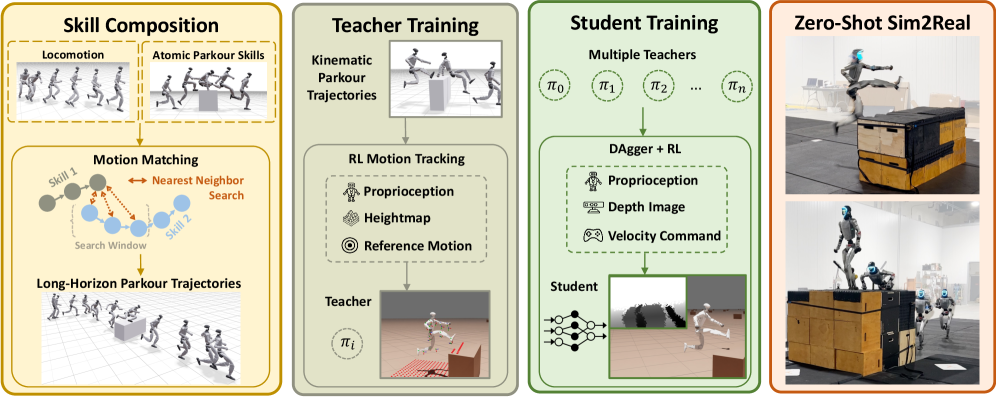
PHP 采用模块化框架:
- 动态技能库(跳跃、跨越、落地缓冲等)来自人类运动先验;
- motion matching 在在线阶段做技能拼接,保证轨迹连续性;
- 感知模块提供地形/障碍条件,驱动技能选择。
可抽象为:
其中第一项衡量环境匹配,第二项约束技能切换平滑性。
Experiment reading guide
重点看:
- 障碍课程长度增加时成功率衰减曲线;
- 与端到端 locomotion policy 的恢复能力对比;
- 感知噪声或视觉延迟下的鲁棒性。
Limitations
- 对高质量运动先验依赖较强;
- 模块间接口调参复杂;
- 尚未充分评估极端材料/湿滑地面等 OOD 条件。
Future work
可将技能选择与模型预测控制统一为 risk-aware objective,并融合接触估计提升高冲击动作稳定性。
Replication angle
先在固定障碍模板下复现实验,再引入随机地形扰动,观察 motion matching 的切换稳定区间。
Figure links
{kind=link}
{kind=link}
Graph: Paper Node 2602.15827