Title: Dex4D: Task-Agnostic Point Track Policy for Sim-to-Real Dexterous Manipulation
Authors: Yuxuan Kuang, Sungjae Park, Katerina Fragkiadaki, Shubham Tulsiani
arXiv: https://arxiv.org/abs/2602.15828
Problem framing
灵巧手通用策略的核心瓶颈是:真实遥操作数据昂贵、任务级奖励设计重、不同任务之间难共享。Dex4D 的切入点是“先学任务无关的可重组技能”,再在真实场景用最少标注做重组,而不是为每个任务单独训练一条策略。
Core method
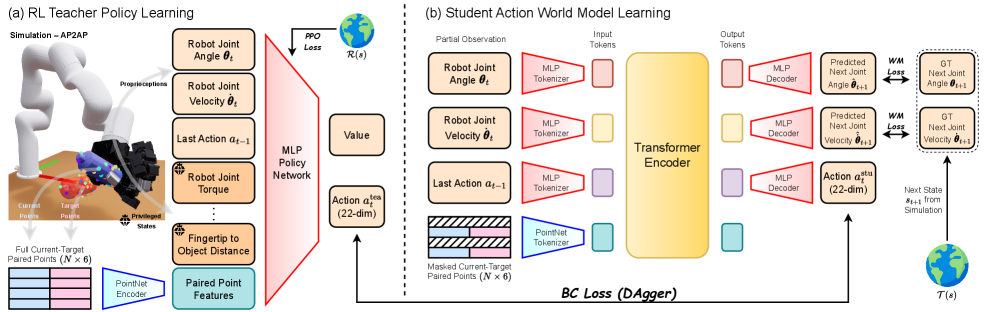
方法将策略学习拆为两层:
- Point-track skill prior:在仿真中学习稳定的接触/运动基元,输入是视觉点轨迹与手部状态;
- Task composition head:在下游任务中按目标组合基元,减少每任务重新学习成本。
核心思想可写为:
其中 是任务无关技能, 是任务相关重组权重。
Experiment reading guide
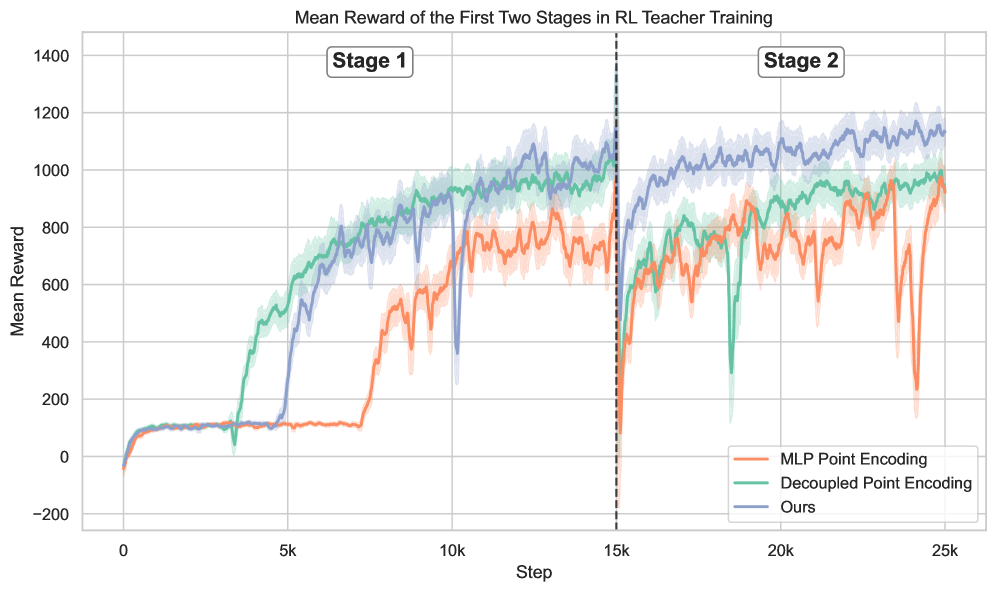
优先看三点:
- sim2real 转移下,相比 task-specific policy 的成功率增益;
- 新任务 few-shot 适配时,样本效率曲线是否明显更陡;
- 不同手型/不同物体类别下,point-track 表征是否保持稳定。
Limitations
- 仍依赖高质量轨迹提取,感知噪声大时会影响基元重组;
- 对超长时程任务(多阶段工具使用)是否可扩展尚不充分;
- 真实世界触觉反馈利用程度仍有限。
Future work
可结合触觉 token 与对象部件拓扑图,把“轨迹对齐”升级到“接触语义对齐”,进一步增强跨物体泛化。
Replication angle
复现时建议先固定仿真技能库规模 ,做 “skills frozen vs end-to-end finetune” 对照,重点观察 real-world 样本效率差异。
Figure links
{kind=link}
{kind=link}
Graph: Paper Node 2602.15828