Title: Learning to unfold cloth: Scaling up world models to deformable object manipulation
Authors: Jack Rome, Stephen James, Subramanian Ramamoorthy
arXiv: https://arxiv.org/abs/2602.16675
Problem framing
布料操作是高维形变 + 接触耦合问题,刚体操控范式在跨材质/折痕场景下泛化不足。
Core method
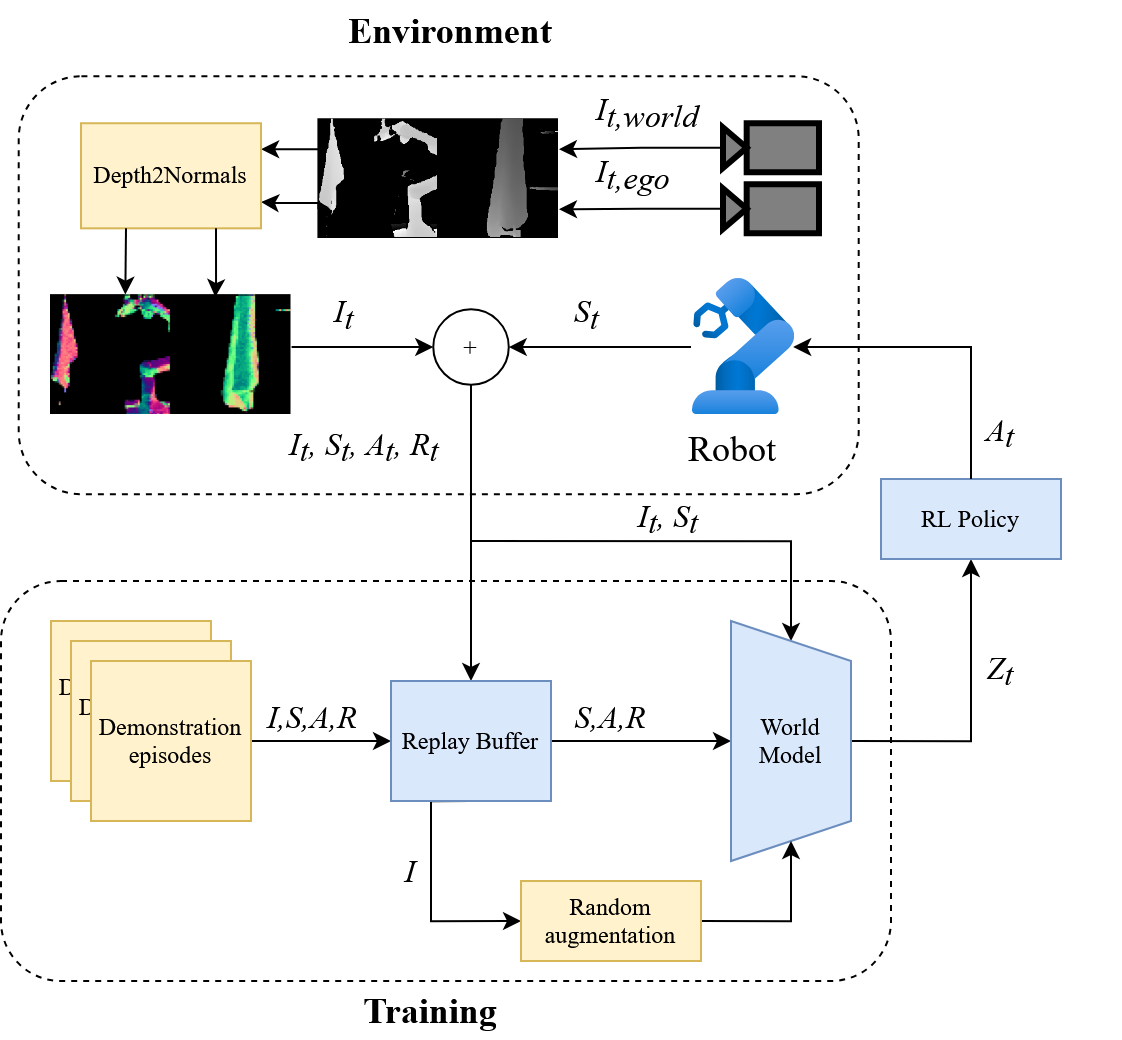
在 DreamerV2 基础上增强 world model:加入 surface normals 输入,并改造 replay buffer 与数据增强流程。
Key equations and mechanisms
沿用 latent imagination RL:
法向输入提升局部几何可辨识度,缓解视觉同像异态。
Experiment reading guide
重点看 zero-shot 实机 unfold、跨材质稳健性、以及 normals/buffer 的消融贡献。
Limitations
主要覆盖 unfold;复杂遮挡与长时 rollout 偏差问题仍在。
Future work
加入触觉和层级子目标,扩展到 folding/packing 等更复杂可变形任务。
Replication angle
先单材质做 ablation,再做跨材质扩展,重点记录想象偏差导致的失败模式。
图链接(可直链渲染):https://arxiv.org/html/2602.16675v1/media/system_diagram2.png
{kind=link}
Graph: Paper Node 2602.16675