Title: EgoScale: Scaling Dexterous Manipulation with Diverse Egocentric Human Data
Authors: Ruijie Zheng et al.
arXiv: https://arxiv.org/abs/2602.16710
Problem framing
关键问题是:大规模人类第一视角数据能否稳定迁移到高自由度灵巧手控制,并形成可预测的性能收益。
Core method
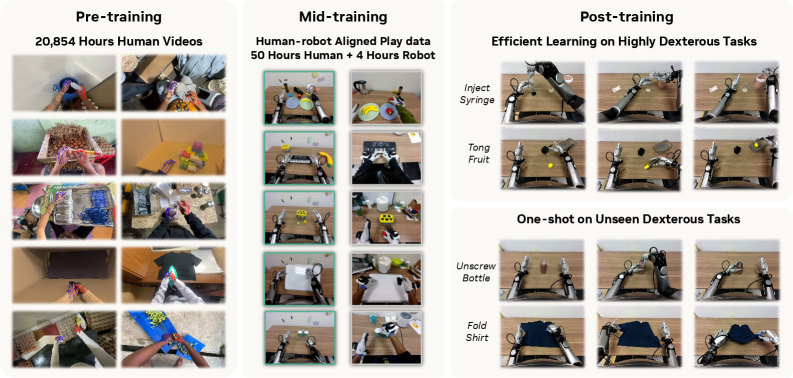
两阶段:大规模 human VLA 预训练(20,854h)+ 轻量 human-robot 对齐中训。
Key equations and mechanisms
给出近似缩放关系:
且验证损失与真实机器人成功率强相关。
Experiment reading guide
先看 22DoF 成功率提升(+54% 相对 no-pretrain),再看 one-shot 与跨 DoF 迁移。
Limitations
纯 human-only 迁移仍不足;human-robot 动作空间错配仍是瓶颈。
Future work
结合 embodiment-aware tokenizer 与约束映射,降低迁移失真。
Replication angle
先做 1x/5x/10x 数据缩放,验证 loss-性能相关性是否可复现。
图链接(可直链渲染):https://arxiv.org/html/2602.16710v1/x1.png
{kind=link}
Graph: Paper Node 2602.16710