Title: Learning to Build: Autonomous Robotic Assembly of Stable Structures Without Predefined Plans
Authors: Jingwen Wang, Johannes Kirschner, Paul Rolland, Luis Salamanca, Stefana Parascho
arXiv: https://arxiv.org/abs/2602.23934
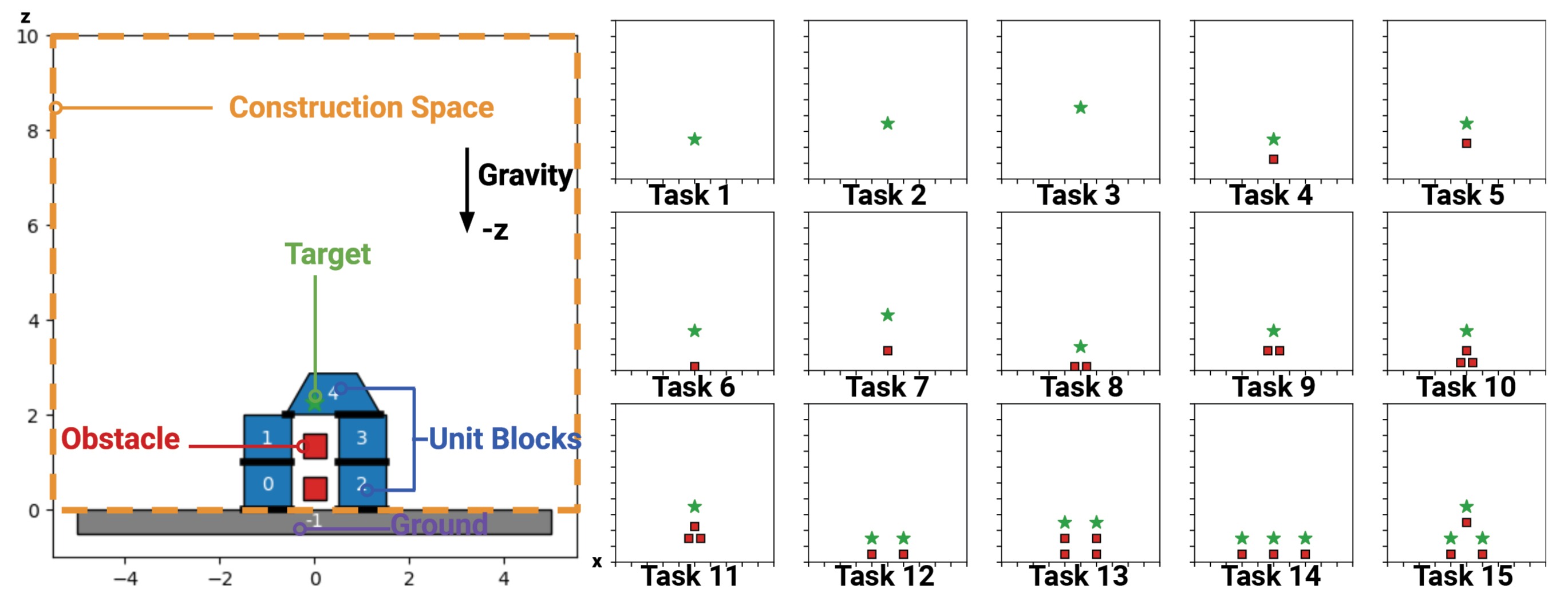
Problem framing
摆脱预定义蓝图,在目标/障碍约束下进行在线构建,核心难点是稳定性与可达性的组合决策。
Core method
将建造建模为序列决策:状态编码结构拓扑与障碍,采用 DQN + successor features 做可迁移价值分解。
Key equations and mechanisms
价值分解:
其中 表示长期特征占用, 为任务偏好权重,支持任务切换时快速重用。
Experiment reading guide
关注无蓝图构建成功率、障碍变化泛化、以及 SF 相对普通 DQN 的迁移收益。
Limitations
策略决策与底层执行误差会耦合放大;结构状态估计偏差会影响稳定性判断。
Future work
可引入物理一致 world model 或可微稳定性 proxy 做前瞻评估。
Replication angle
先仿真复现状态编码+SF,再接真实机械臂验证任务切换无需重训的能力。
Figure: https://arxiv.org/html/2602.23934v1/Figures/Problem_Task.jpg
{kind=link}
Graph: Paper Node 2602.23934