Title: Reactive Slip Control in Multifingered Grasping: Hybrid Tactile Sensing and Internal-Force Optimization
Authors: Théo Ayral, Saifeddine Aloui, Mathieu Grossard
arXiv: https://arxiv.org/abs/2602.16127
Problem framing
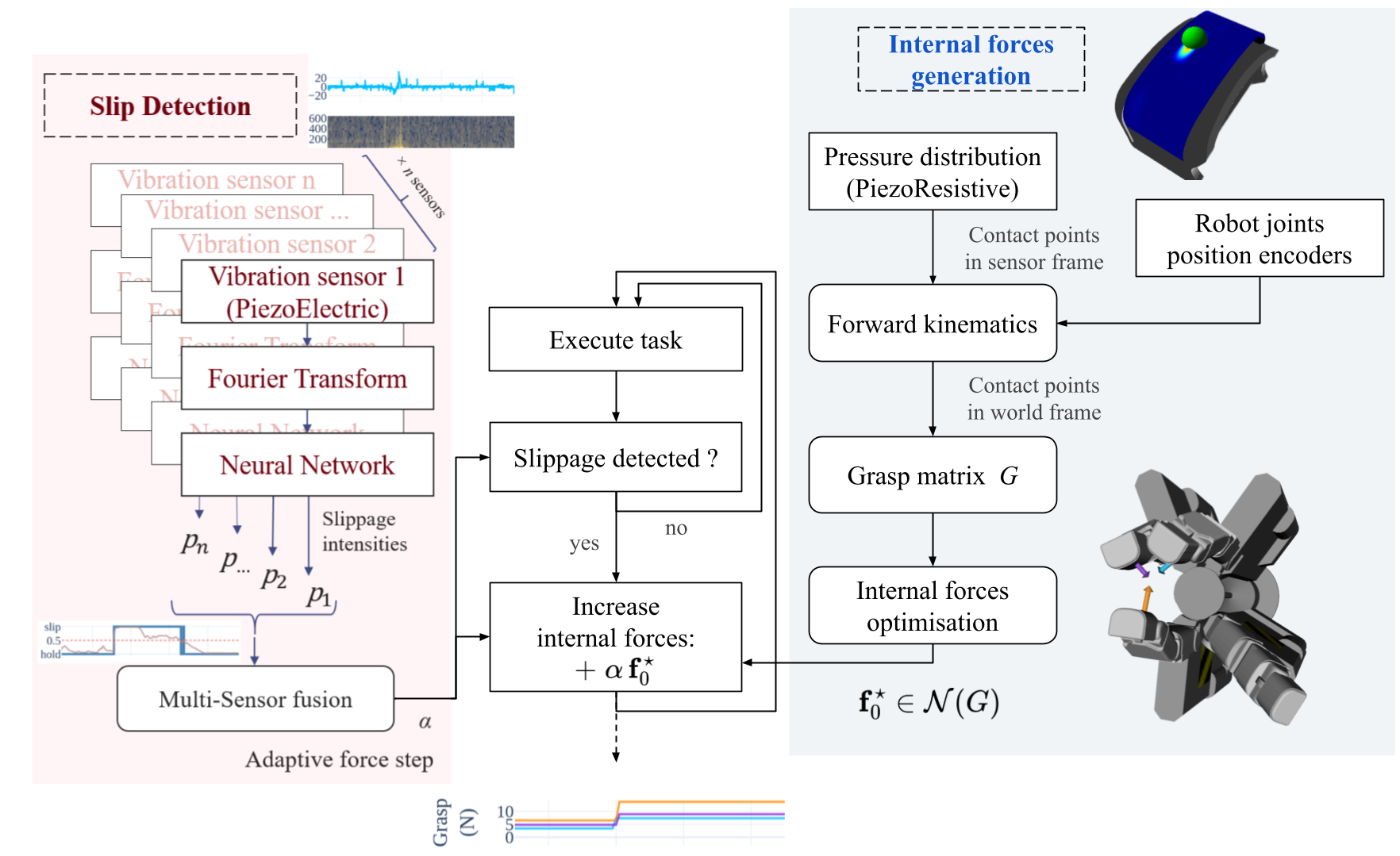
多指抓取里的 in-hand slip 控制常见瓶颈是“检测快但控制慢”或“控制准但感知滞后”。这篇工作尝试把两类触觉互补融合。
Core method
用 PzE 传感做快速滑移触发,用 PzR 阵列做接触定位与抓取矩阵在线更新;发生 slip 后,在抓取内力零空间解一个 QP 调整内力,保持目标外力矩不变并满足执行器约束。
Key equations and mechanisms
内力优化可写为:
其中 为抓取矩阵。文中给出端到端 35-40ms 理论感知到命令延迟,强调实时闭环可行性。
Experiment reading guide
优先看 slip onset 检测时延(约 20ms)与扰动下稳定抓取恢复曲线,判断其是否真正达到“可操作的亚 50ms 闭环”。
Limitations
实验主要在受控条件,面对复杂材质/高频冲击时的泛化还需更多公开基准。
Future work
可结合学习型接触状态估计器,提升复杂物体表面下的鲁棒性与内力分配效率。
Replication angle
复现时先搭建高频触觉数据通路(系统延迟往往比算法耗时更关键),再验证 QP 内力更新是否稳定。
图链接(可直链渲染):
{kind=link}
Graph: Paper Node 2602.16127