Title: Dynamic Modeling and MPC for Locomotion of Tendon-Driven Soft Quadruped
Authors: Saumya Karan, Neerav Maram, Suraj Borate, Madhu Vadali
arXiv: https://arxiv.org/abs/2602.16371
Problem framing
软体四足常见痛点是“模型保真度 vs 实时控制”两难:连续体模型足够真实但难实时,简化刚体模型可控但损失关键弹性机理。本文尝试把两者拼起来。
Core method
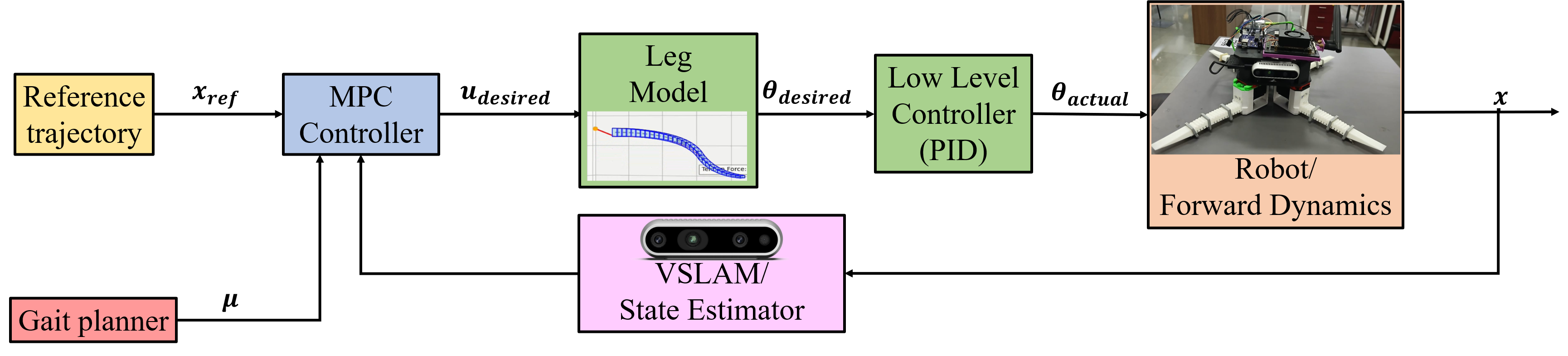
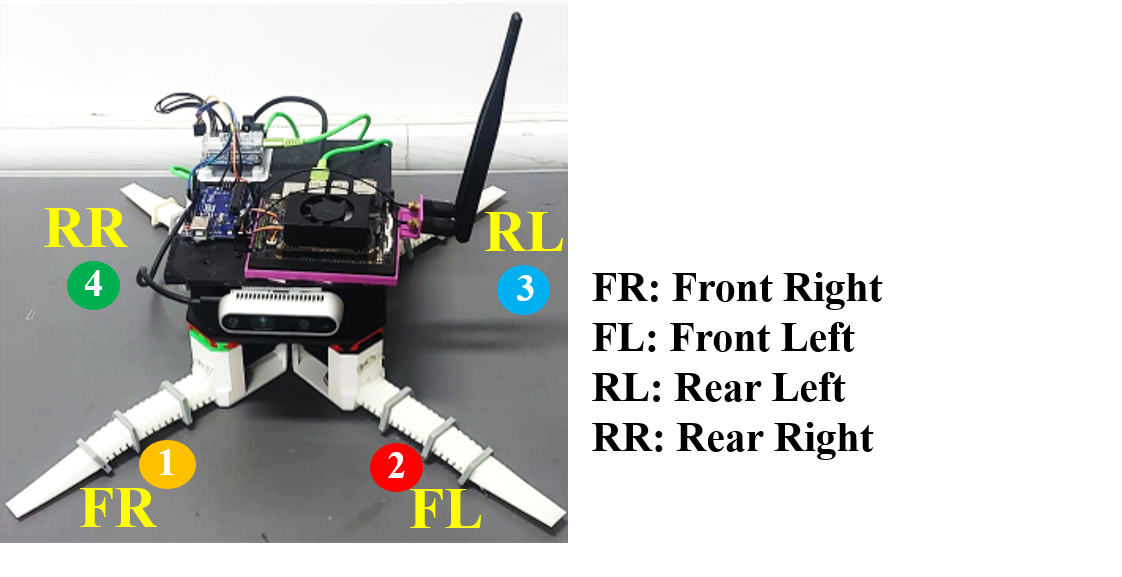
每条软腿采用离散 Cosserat rod 建模,显式刻画大变形、弹性分布、腱驱动与接触;再通过“反作用力接口”把软腿动力学映射到刚体躯干层,形成模块化全身模型。控制层是 convex MPC,先优化地反力,再通过物理一致 force-angle 关系映射到腱张力命令。
Key equations and mechanisms
MPC 主体可抽象为:
subject to
并用映射 将最优地反力转成腱驱动。该“先力后驱动”分解是其可实时性的核心。
Experiment reading guide
重点看 crawling/walking 两类 gait 的 COM 轨迹误差(文中报告 <5mm RMSE)和扰动恢复。阅读时建议把“单腿高度控制图”与“全身 COM 结果”对照,理解局部连续体建模如何传导到全身稳定性。
Limitations
当前主要在低速 gait 与单机体型验证,复杂地形高速运动下的模型失配与接触切换鲁棒性仍需更多证据。
Future work
可并入学习型残差项(补偿未建模黏弹性与接触迟滞),并扩展到高自由度软硬混合腿足平台。
Replication angle
若要复现,先单腿辨识 Cosserat 参数,再接全身 MPC;不要一开始端到端联合调参,否则会陷入不可分辨误差。
图链接(可直链渲染):
- https://arxiv.org/html/2602.16371v1/Figures/mpc_blk_diagram.png
- https://arxiv.org/html/2602.16371v1/Figures/slot_hardware_white.png
{kind=link}
{kind=link}
Graph: Paper Node 2602.16371