Title: Reactive Motion Generation With Particle-Based Perception in Dynamic Environments
Authors: Xiyuan Zhao, Huijun Li, Lifeng Zhu, Zhikai Wei, Xianyi Zhu, Aiguo Song
arXiv: https://arxiv.org/abs/2602.16462
Problem framing
动态障碍场景下,很多机械臂 reactive planning 仍隐含“静态世界”假设,导致避障保守或失效。本文把动态感知与规划耦合处理。
Core method
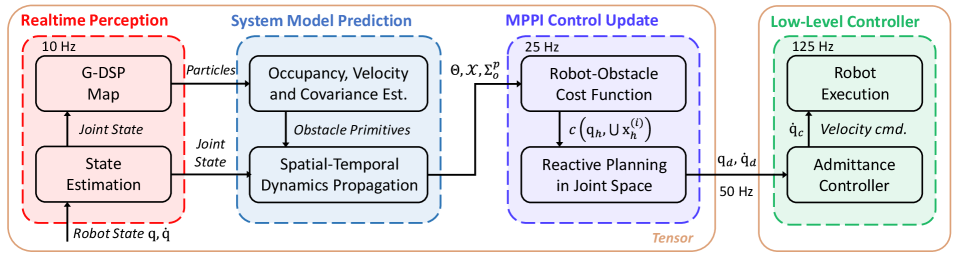
感知端提出张量化粒子权重更新,同时显式维护障碍速度与协方差信息;规划端用 obstacle-aware MPPI,把机器人-障碍联合动力学前向传播到采样轨迹评估。
Key equations and mechanisms
MPPI 权重更新核心:
w_k\propto\exp\Big(- rac{1}{\lambda}S(\tau_k)\Big),\quad S(\tau_k)=\sum_t \ell(x_t,u_t,\hat{o}_t)其中 来自粒子动态映射而非静态估计,使代价函数对未来碰撞风险更敏感。
Experiment reading guide
看 noisy real-world 场景中的动态多障碍实验,重点对比同类 MPPI baseline 的碰撞率与轨迹抖动。
Limitations
主要验证在操作局部场景,尚缺大尺度长时序任务;粒子数增大时计算开销上升明显。
Future work
可与学习型 occupancy/world model 融合,提升远时域预测并降低粒子退化。
Replication angle
可先复现“静态感知+MPPI”基线,再替换为动态粒子图,量化安全边际增益。
图链接(可直链渲染):
{kind=link}
Graph: Paper Node 2602.16462